
Παρακολουθήστε ένα ρομπότ σκύλου να μαθαίνει να περνά μέσα από μια διαδρομή με εμπόδια που μοιάζει με κλήμα
Τα τετράποδα
ρομπότ
μπορούν να επιτελέσουν πολλές σύνθετες εργασίες, αλλά υπάρχει ένας λόγος που δεν τα βλέπετε συχνά να περιηγούνται σε «απασχολημένα» περιβάλλοντα όπως τα
δάση
ή η υπερανάπτυξη με αμπέλια. Παρά όλες τις ικανότητές τους, τα περισσότερα ενσωματωμένα συστήματα τεχνητής νοημοσύνης παραμένουν αρκετά κακά στο να ανταποκρίνονται σε όλες αυτές τις φυσικές μεταβλητές σε πραγματικό χρόνο. Μπορεί να φαίνεται σαν δεύτερη φύση για εμάς, αλλά χρειάζεται μόνο το παραμικρό λάθος σε τέτοιες καταστάσεις για να στείλουμε ένα τετράποδο ρομπότ να πέφτει.
Ωστόσο, αφού υπέβαλαν το δικό τους σκυλί-ρομπότ σε ένα μπαράζ από διαδρομές με εμ
πόδια
, μια ομάδα στο Κολλέγιο Μηχανικών του Πανεπιστημίου Carnegie Mellon προσφέρει τώρα ένα σταθερό βήμα προς τα εμπρός, θα λέγαμε, για τα ρομπότ που αναπτύσσονται στη φύση. Σύμφωνα με τους ερευνητές, η διδασκαλία ενός τετράποδου ρομπότ να μαζεύει αντιδραστικά τα πόδια του ενώ περπατά παρέχει το καλύτερο βάδισμα τόσο για πλοήγηση όσο και για ξεμπλέξιμο από τα εμπόδια στο δρόμο του.
[Related: How researchers trained a
budget
robot dog to do tricks.]
«Τα εμπόδια του πραγματικού κόσμου μπορεί να είναι δύσκαμπτα όπως ένας βράχος ή μαλακά σαν κλήμα και θέλουμε τα ρομπότ να έχουν στρατηγικές που να αποτρέπουν το παραπάτημα» είπε ο Justin Yim, καθηγητής μηχανικής του Πανεπιστημίου του Illinois Urbana-Champaign και συνεργάτης του έργου.
Πρόσφατο highlight της CMU
.
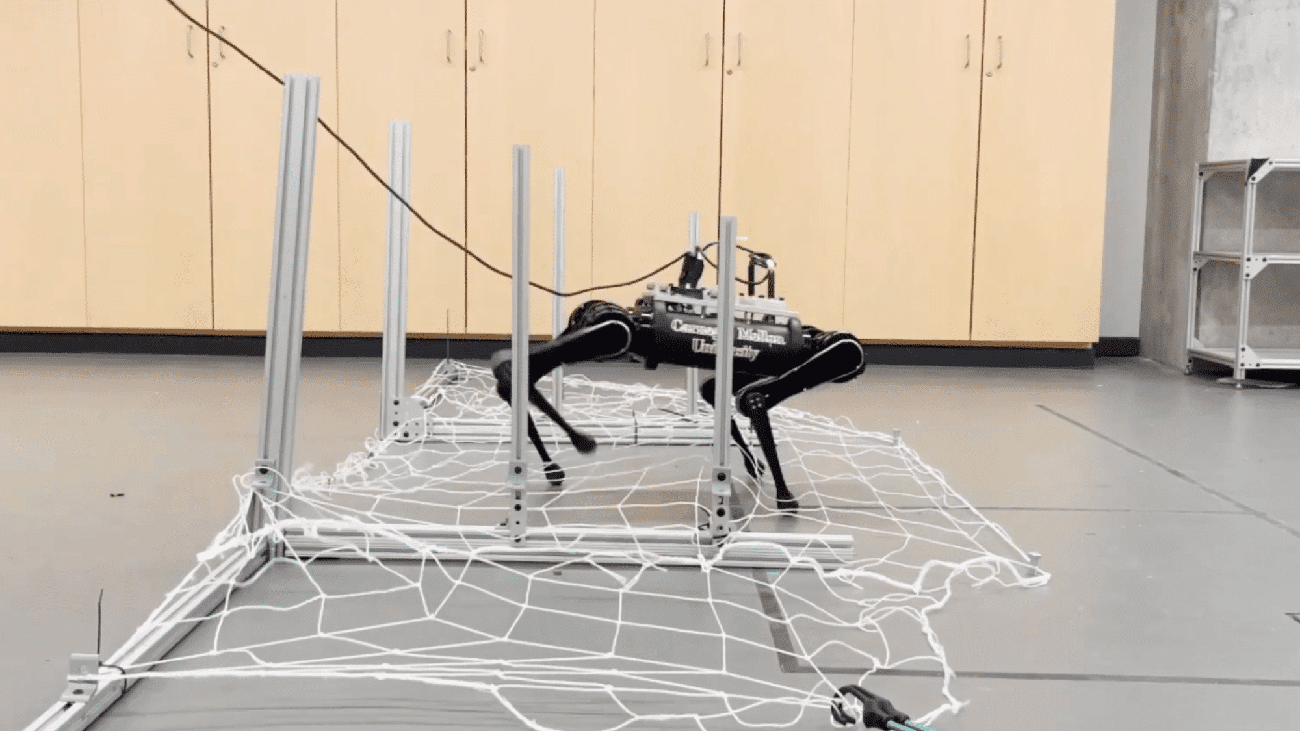
Οι μηχανικοί συνέκριναν τις στρατηγικές πολλαπλών βημάτων σε ένα τετράποδο ρομπότ ενώ προσπαθούσε να περπατήσει σε μια μικρή απόσταση που διακόπτεται από πολλαπλά, χαμηλά σχοινιά. Το ρομπότ μπλέχτηκε γρήγορα ενώ έκανε ψηλά βήματα ή περπατούσε με τα γόνατά του στραμμένα προς τα εμπρός, αλλά ανασύροντας τα άκρα του αμέσως μετά την ανίχνευση ενός εμποδίου του επέτρεψε να διασχίσει ομαλά το τέντωμα του δαπέδου.
«Όταν παίρνετε ρομπότ σε εξωτερικούς χώρους, το όλο πρόβλημα της αλληλεπίδρασης με το περιβάλλον γίνεται εκθετικά πιο δύσκολο γιατί πρέπει να είστε πιο συνειδητοποιημένοι σε ό,τι κάνετε», είπε στο CMU ο David Ologan, ένας μεταπτυχιακός φοιτητής μηχανολογίας. «Το σύστημά σας πρέπει να είναι αρκετά στιβαρό για να χειρίζεται τυχόν απρόβλεπτες περιστάσεις ή εμπόδια που μπορεί να συναντήσετε. Είναι ενδιαφέρον να αντιμετωπίσουμε αυτό το πρόβλημα που δεν έχει αναγκαστικά λυθεί ακόμα.”
[Related: This robot dog learned a new trick—balancing like a cat.]
Αν και τα τροχοφόρα ρομπότ μπορεί να εξακολουθούν να αποδεικνύονται πιο κατάλληλα για αστικά περιβάλλοντα, όπου το έδαφος είναι γενικά πιο επίπεδο και οι υποδομές όπως οι ράμπες είναι πιο συνηθισμένες, τα bot που περπατούν θα μπορούσαν υποθετικά να αποδειχθούν πολύ πιο χρήσιμα σε εξωτερικούς χώρους. Οι ερευνητές πιστεύουν ότι η ενσωμάτωση της αντιδραστικής απόκρισης ανάκλησης σε υπάρχοντα συστήματα πλοήγησης AI θα μπορούσε να βοηθήσει τα ρομπότ κατά τη διάρκεια αποστολών έρευνας και διάσωσης σε εξωτερικούς χώρους. Η πρόσφατα σχεδιασμένη κομψότητα μπορεί επίσης να βοηθήσει τα τετράποδα ρομπότ να διεξάγουν περιβαλλοντικές έρευνες χωρίς να βλάπτουν το περιβάλλον τους.
“Η δυνατότητα για ρομπότ με πόδια σε εξωτερικά περιβάλλοντα με βάση τη βλάστηση είναι ενδιαφέρον να δούμε”, δήλωσε ο Ologan. “Εάν ζείτε σε μια πόλη, μια
πλατφόρμα
με τροχούς είναι πιθανώς μια καλύτερη επιλογή… Υπάρχει μια αντιστάθμιση μεταξύ του να μπορείτε να κάνετε πιο σύνθετες ενέργειες και να είστε αποτελεσματικοί με τις κινήσεις σας.”