
Το MIT αναπτύσσει ένα σύστημα σχεδιασμού κίνησης και εργασιών για οικιακά ρομπότ
Γιατί δεν υπάρχουν περισσότερα ρομπότ στα σπίτια; Αυτή είναι μια εκπληκτικά περίπλοκη ερώτηση – και τα σπίτια μας είναι εκπληκτικά πολύπλοκα μέρη. Ένα μεγάλο μέρος του λόγου για τον οποίο τα αυτόνομα συστήματα ευδοκιμούν σε δάπεδα αποθήκης και εργοστασίων είναι πρώτα η σχετική ευκολία πλοήγησης σε ένα δομημένο περιβάλλον. Σίγουρα, τα περισσότερα συστήματα εξακολουθούν να απαιτούν να χαρτογραφηθεί ένας χώρος πριν φτάσουν στην εργασία, αλλά από τη στιγμή που αυτό είναι στη θέση του, τείνει να υπάρχει μικρή παραλλαγή.
Τα σπίτια, από την άλλη πλευρά, είναι ένα είδος εφιάλτη. Όχι μόνο διαφέρουν δραματικά από μονάδα σε μονάδα, αλλά είναι γεμάτα εχθρικά εμπόδια και τείνουν να είναι αρκετά δυναμικά, καθώς τα έπιπλα μετακινούνται ή τα πράγματα αφήνονται στο πάτωμα. Οι σκούπες είναι τα πιο διαδεδομένα ρομπότ στο σπίτι και εξακολουθούν να βελτιώνονται μετά από δεκαετίες στην αγορά.
Αυτή την εβδομάδα, οι ερευνητές στο MIT CSAIL παρουσιάζουν
PIGINet
(Σχέδια, Εικόνες, Στόχος και Αρχικά γεγονότα), το οποίο έχει σχεδιαστεί για να φέρει τον προγραμματισμό εργασιών και κίνησης στα οικιακά ρομποτικά συστήματα. Το νευρωνικό δίκτυο έχει σχεδιαστεί για να βοηθά στον εξορθολογισμό της ικανότητάς τους να δημιουργούν σχέδια δράσης σε διαφορετικά περιβάλλοντα.
Το MIT εξηγεί το PIGINet ως εξής:
[I]Το t χρησιμοποιεί έναν κωδικοποιητή μετασχηματιστή, ένα ευέλικτο και προηγμένο μοντέλο σχεδιασμένο να λειτουργεί σε ακολουθίες δεδομένων. Η ακολουθία εισόδου, σε αυτήν την περίπτωση, είναι πληροφορίες σχετικά με το σχέδιο εργασίας που εξετάζει, εικόνες του περιβάλλοντος και συμβολικές κωδικοποιήσεις της αρχικής κατάστασης και του επιθυμητού στόχου. Ο κωδικοποιητής συνδυάζει τα σχέδια εργασιών, την εικόνα και το κείμενο για να δημιουργήσει μια πρόβλεψη σχετικά με τη σκοπιμότητα του επιλεγμένου σχεδίου εργασιών.
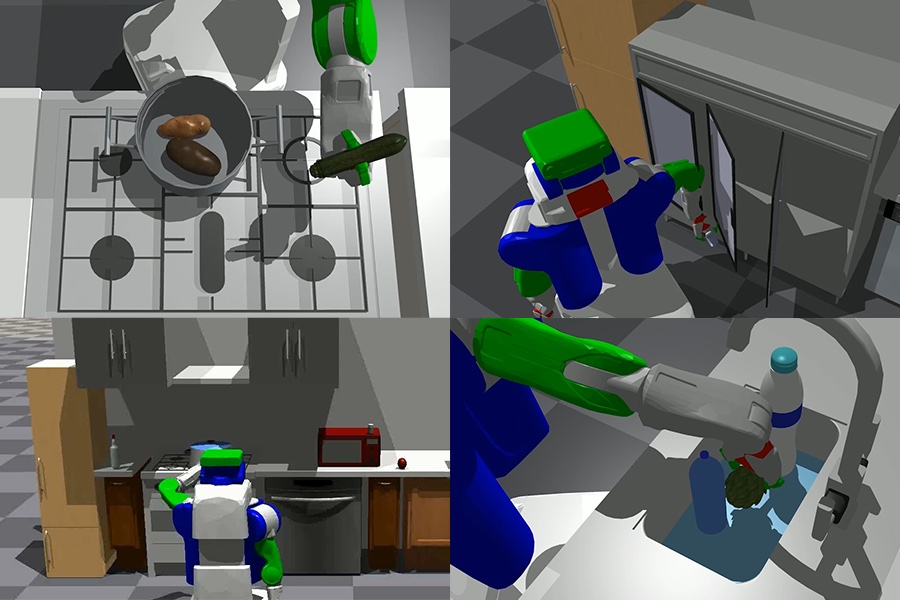
Το σύστημα επικεντρώνεται σε μεγάλο βαθμό σε δραστηριότητες που βασίζονται στην κουζίνα επί του παρόντος. Βασίζεται σε προσομοιωμένα οικιακά περιβάλλοντα για την κατασκευή σχεδίων που απαιτούν αλληλεπιδράσεις με διάφορα διαφορετικά στοιχεία του περιβάλλοντος, όπως πάγκους, ντουλάπια, ψυγείο, νεροχύτες κ.λπ. Οι ερευνητές λένε ότι σε απλούστερα σενάρια, το PIGINet κατάφερε να μειώσει τον χρόνο προγραμματισμού κατά 80% . Για πιο σύνθετες καταστάσεις, αυτός ο αριθμός ήταν γενικά γύρω στο 20-50%.
Η ομάδα προτείνει ότι τα σπίτια είναι μόνο η αρχή.
«Οι πρακτικές εφαρμογές του PIGINet δεν περιορίζονται στα νοικοκυριά», λέει ο φοιτητής διδάκτορας, Zhutian Yang. «Ο μελλοντικός μας στόχος είναι να βελτιώσουμε περαιτέρω το PIGINet για να προτείνουμε εναλλακτικά σχέδια εργασιών μετά τον εντοπισμό μη εφικτών ενεργειών, οι οποίες θα επιταχύνουν περαιτέρω τη δημιουργία εφικτών σχεδίων εργασιών χωρίς την ανάγκη μεγάλων συνόλων δεδομένων για την εκπαίδευση ενός σχεδιαστή γενικής χρήσης από την αρχή. Πιστεύουμε ότι αυτό θα μπορούσε να φέρει επανάσταση στον τρόπο με τον οποίο τα ρομπότ εκπαιδεύονται κατά την ανάπτυξη και στη συνέχεια εφαρμόζονται στα σπίτια όλων».

