
Εκπαίδευση σκύλου ρομπότ στο άνοιγμα πόρτας με το πόδι
Τα τετράποδα ρομπότ
εμπ
νευσμένα από σκύλους έχουν αυξηθεί σε δημοτικότητα μεταξύ των επιστημόνων και των πρώτων ανταποκριτών τα τελευταία χρόνια χάρη στη μοναδική τους ικανότητα να χειρίζονται γρήγορα και με ασφάλεια περιοχές επικίνδυνες ή απρόσιτες για τον άνθρωπο. Μερικά από αυτά τα ρομπότ, όπως το Boston Dynamics’ Spot, μπορούν να χρησιμοποιήσουν μεγάλα νύχια και άλλα
εξαρτήματα
για να τα βοηθήσουν να αλληλεπιδράσουν με τον κόσμο γύρω τους. Αλλά αυτά τα πρόσθετα άκρα
δεν είναι
πάντα ιδανικά, καθώς προσθέτουν βάρος και καταλαμβάνουν επιπλέον χώρο, και τα δύο θα μπορούσαν να περιορίσουν την αποτελεσματικότητα του ρομποσκύλου σε στενούς διαδρόμους.
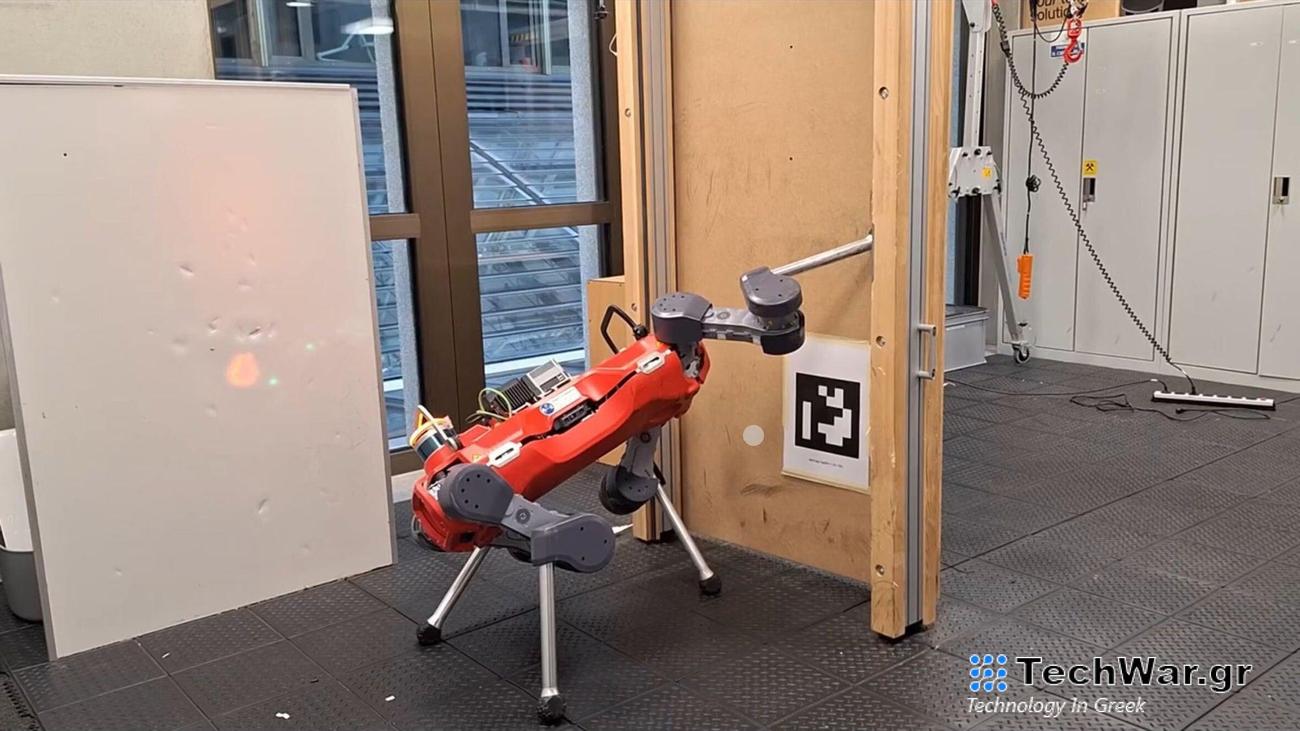
Ερευνητές στο Εργαστήριο Ρομποτικών Συστημάτων του ETH Ζυρίχης στην Ελβετία προσπάθησαν να λύσουν αυτό το δίλημμα εκπαιδεύοντας τον δικό τους σκύλο ρομπότ να χρησιμοποιεί ένα από τα τέσσερα άκρα του για να ολοκληρώσει εργασίες όπως το άνοιγμα μιας πόρτας και η μετακίνηση αντικειμένων ενώ ταυτόχρονα βασίζονται στα άλλα τρία άκρα για να περπατούν και να διατηρούν την ισορροπία τους. . Σε ένα
χαρτί που κυκλοφόρησε πρόσφατα
τεκμηριώνουν τα ευρήματά τους
οι ερευνητές λένε ότι πιστεύουν ότι αυτή η νέα χρήση του άκρου του ρομπότ θα μπορούσε κάποτε να βοηθήσει στην εξερεύνηση του διαστήματος και σε άλλα σενάρια όπου το βάρος και η μηχανική ακίνητη περιουσία είναι υψηλές.
Πώς χρησιμοποίησε το πόδι του ο σκύλος ρομπότ;
Οι ερευνητές χρησιμοποίησαν ένα μοντέλο ενισχυτικής μάθησης για να διδάξουν στον σκύλο ρομπότ, ένα
ANYmal μοντέλο κατασκευασμένο από την εταιρεία ANYbotic
, για να ολοκληρώσει μια σειρά εργασιών όπου έπρεπε να χειριστεί το περιβάλλον του. Το μοντέλο ανταμείφθηκε με θετική ενίσχυση όταν το ρομπότ τοποθέτησε το μπροστινό δεξί άκρο του στην επιθυμητή θέση. Από την άλλη πλευρά, το μοντέλο αναβίωσε την αρνητική ενίσχυση όταν το ρομπότ χρησιμοποίησε σπασμωδικές, πιθανές μη ασφαλείς κινήσεις. Από εκεί, το ρομπότ έμαθε να χρησιμοποιεί τα υπόλοιπα τρία του πόδια για να ισορροπεί και να κινείται. Οι ερευνητές μπόρεσαν να μετακινήσουν το ρομπότ χρησιμοποιώντας ένα joystick σε ένα τηλεχειριστήριο.
Οι φωτογραφίες του πειράματος δείχνουν το ρομπότ να σηκώνει το μπροστινό του άκρο και να το τοποθετεί δίπλα σε ένα χερούλι πόρτας πριν μετατοπίσει το βάρος του για να το ανοίξει. Κατά ειρωνικό τρόπο, η κίνηση δεν είναι παρόμοια με ένα γούνινο ζωντανό σκυλί που σηκώνει το πόδι του για να ανακουφιστεί πάνω από έναν πυροσβεστικό κρουνό. Σε άλλο σημείο, το ρομπότ μπορεί να φανεί να τυλίγει ένα λουράκι σακιδίου γύρω από το άκρο του και στη συνέχεια να τοποθετεί την
τσάντα
πάνω και ξανά σε ένα πλαστικό δοχείο. Οι ερευνητές πειραματίστηκαν επίσης με τη σύνδεση μιας λαβής σαν νύχι στο άκρο του ποδιού που επέτρεψε στο ρομπότ να αρπάξει και να συλλέξει με επιτυχία δείγματα βράχου. Το ρομπότ θα μπορούσε επίσης να χρησιμοποιήσει το χέρι του για να απομακρύνει μικρά εμπόδια από το δρόμο του και να πατήσει διαφορετικά δύσκολα προσβάσιμα κουμπιά.
«Η δουλειά μας δείχνει ότι πολλές εργασίες χειραγώγησης μπορούν να λυθούν κάνοντας μόνο ποδήλατο με τετράποδα ρομπότ», οι ερευνητές
έγραψε
. “Αυτή η εικόνα θα είναι σχετική για μελλοντικές εργασίες σχετικά με το σχεδιασμό και τον έλεγχο χειριστών κινητών με πόδια.”
Οι ερευνητές εκπαίδευσαν το ρομπότ σε ακανόνιστο έδαφος για να διασφαλίσουν ότι θα μπορούσε να διατηρήσει την ισορροπία ακόμη και όταν αντιμετωπίζει λιγότερο από ιδανικά σενάρια πραγματικού κόσμου που μπορεί να συναντήσει στον πραγματικό κόσμο. Για να ελέγξουν την ισορροπία του ρομπότ, οι ερευνητές το τοποθέτησαν πάνω σε έναν λείο πίνακα με σχεδόν καθόλου τριβή και το έβαλαν να προσπαθήσει να ολοκληρώσει εργασίες. Γλίστρησε αλλά δεν έπεσε.
Πώς θα μπορούσε αυτό το τρίποδο σκυλί ρομπο να είναι χρήσιμο
Αν και το τρίποδο σκυλί δεν ήταν απαραίτητα τόσο αποτελεσματικό όσο άλλα μοντέλα με προσαρτώμενα νύχια, οι ερευνητές λένε ότι η πραγματική του δύναμη βρίσκεται στην απλότητά του. Χάνοντας τυχόν πρόσθετα νύχια ή εργαλεία, οι ερευνητές το ρομπότ τους αποφεύγει να προσθέσει περισσότερη περιττή μηχανική πολυπλοκότητα. Αυτή η προσέγγιση μειώνει επίσης το βάρος και θα μπορούσε να μειώσει την κατανάλωση ενέργειας, και τα δύο θα μπορούσαν να αποδειχθούν ιδιαίτερα χρήσιμα στην εξερεύνηση του διαστήματος ή στις απομακρυσμένες αποστολές έρευνας και διάσωσης.
Προς το παρόν, η γενική αδυναμία των τετράποδων ρομπότ να χειριστούν το περιβάλλον τους σημαίνει ότι υποβιβάζονται μόνο σε εργασίες επιθεώρησης και επιτήρησης. Τα ευρήματα των ερευνητών του ETH Zurich, ωστόσο, υποδηλώνουν ένα
μέλλον
όπου αυτά τα ρομπότ θα μπορούν να χρησιμοποιούν μοντέλα τεχνητής νοημοσύνης για να μάθουν για τον κόσμο γύρω τους και να χρησιμοποιούν τα άκρα τους για να αλληλεπιδρούν με αντικείμενα και να ολοκληρώσουν πιο περίπλοκες εργασίες.
https://connect.facebook.net/en_US/sdk.js#xfbml=1&version=v3.2
VIA:
popsci.com
