
Ερευνητές στο MIT δημιούργησαν ένα μικροσκοπικό μαλακό
ρομπότ
εμπνευσμένο από αγγούρι, ικανό να περιηγείται σε διαφορετικά δυσπρόσιτα, τρισδιάστατα περιβάλλοντα χρησιμοποιώντας ένα ενιαίο, αδύναμο μαγνητικό πεδίο. Όπως αναφέρθηκε αρχικά τον περασμένο μήνα σε έγγραφο ανοιχτής πρόσβασης που δημοσιεύτηκε με
Προηγμένα Υλικά
ένας μηχανισμός που μοιάζει με σκουλήκια ιντσών, κατασκευασμένος από στρατηγικά μαγνητισμένες σπείρες πολυμερούς από καουτσούκ, δείχνει τεράστια υπόσχεση στους ελιγμούς σε χώρους τόσο μικρούς όσο τα ανθρώπινα αιμοφόρα αγγεία.
[Related: Seals provided inspiration for a new waddling robot.]
Πριν από αυτό το νεότερο wormbot, τα μαλακά ρομπότ ατμομηχανών απαιτούσαν κινούμενα μαγνητικά πεδία για να ελέγξουν την κατεύθυνση και τη γωνία τους. “[I]Αν θέλετε το ρομπότ σας να περπατά, ο μαγνήτης σας περπατά μαζί του. Αν θέλετε να περιστρέφεται, περιστρέψτε τον μαγνήτη σας», δήλωσε η Polina Ankeeva, επικεφαλής συγγραφέας της εργασίας και καθηγήτρια επιστήμης και μηχανικής υλικών και εγκεφάλου και γνωστικών επιστημών.
είπε σε δήλωση
. “Εάν προσπαθείτε να λειτουργήσετε σε ένα πραγματικά περιορισμένο περιβάλλον, ένας κινούμενος μαγνήτης μπορεί να μην είναι η ασφαλέστερη λύση”, πρόσθεσε η Ankeeva. «Θέλετε να μπορείτε να έχετε ένα σταθερό όργανο που να ισχύει [a] μαγνητικό πεδίο σε ολόκληρο το δείγμα.”
Ως εκ τούτου, το νέο σχέδιο της ερευνητικής ομάδας του MIT δεν μαγνητίζεται ομοιόμορφα όπως πολλά άλλα μαλακά ρομπότ. Μαγνητίζοντας μόνο επιλεγμένες περιοχές και κατευθύνσεις, μόνο ένα μαγνητικό πεδίο μπορεί να δημιουργήσει «ένα προφίλ κίνησης μαγνητικών δυνάμεων», σύμφωνα με την ανακοίνωση του MIT.
Είναι ενδιαφέρον ότι οι μηχανικοί στράφηκαν στις κουλουριασμένες έλικες των αμπελιών αγγουριού για έμπνευση: Δύο τύποι καουτσούκ τοποθετούνται πρώτα το ένα πάνω στο άλλο πριν θερμανθούν και τεντωθούν σε μια λεπτή ίνα. Καθώς το νέο νήμα ψύχεται, το ένα λάστιχο συστέλλεται ενώ το άλλο διατηρεί τη μορφή του για να δημιουργήσει μια σφιχτά τυλιγμένη σπείρα, σαν τα λεπτά κλήματα ενός φυτού αγγουριού που τυλίγονται γύρω από τις κοντινές κατασκευές. Τέλος, ένα υλικό που μπορεί να μαγνητιστεί περνάει μέσα από τη σπείρα πολυμερούς και στη συνέχεια μαγνητίζεται στρατηγικά για να επιτρέψει μια σειρά από επιλογές κίνησης και κατεύθυνσης.
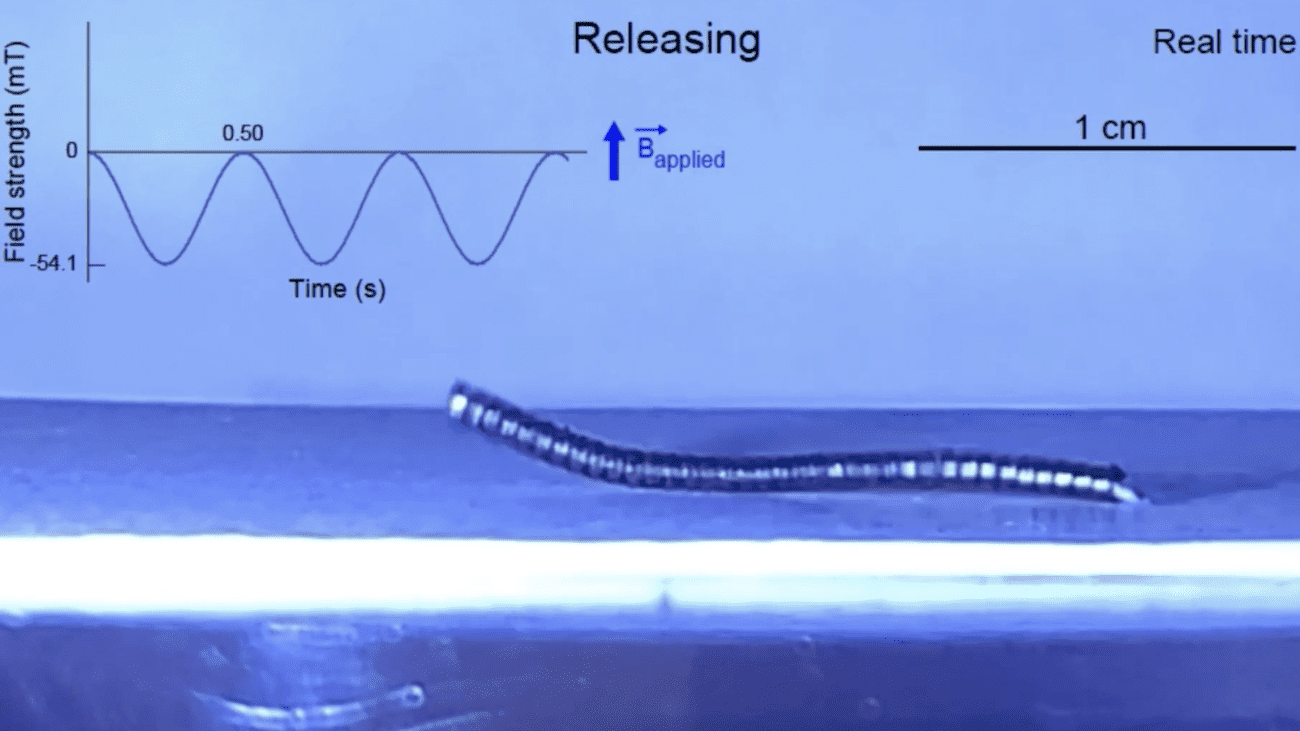
Λόγω των προσαρμόσιμων μαγνητικών μοτίβων κάθε ρομπότ, πολλά soft bots μπορούν να χαρτογραφηθούν ξεχωριστά για να κινούνται προς διαφορετικές κατευθύνσεις όταν και τα δύο εκτίθενται σε ένα ενιαίο, ομοιόμορφο ασθενές μαγνητικό πεδίο. Επιπλέον, ένας ανεπαίσθητος χειρισμός πεδίου επιτρέπει στα ρομπότ να δονούνται – επιτρέποντας έτσι στα μικροσκοπικά σκουλήκια να μεταφέρουν το φορτίο σε μια καθορισμένη τοποθεσία και στη συνέχεια να το αποτινάξουν για να παραδώσουν ένα ωφέλιμο φορτίο. Λόγω των μαλακών υλικών τους και του σχετικά απλού χειρισμού τους, οι ερευνητές πιστεύουν ότι τέτοιοι μηχανισμοί θα μπορούσαν να χρησιμοποιηθούν σε βιοϊατρικές καταστάσεις, όπως η διέλευση μέσω των ανθρώπινων αιμοφόρων αγγείων για την παροχή ενός φαρμάκου σε μια ακριβή τοποθεσία.

